导语:
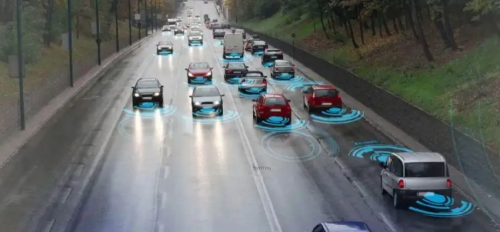
安全一直是个关乎全行业的话题,生产、生活、出行等等方面都离不开。随着中国市场的快速发展,消费者对于汽车的需求正在从满足基本代步功能转向追求舒适、安全、智能的更高层次。这其中,毋庸置疑,安全性的考虑是消费者更为关注的因素。
马斯克曾表示,“所谓智能汽车,其实就是有着四个轮子的智能机器人,特斯拉目前未能实现FSD(完全自动驾驶),一方面还需要解决现实世界的AI技术问题,另一方面要为其设置安全机制,以确保公共安全”。诚然,正如在网络上被常被diss的Autopilot功能在事故前一秒下线这点上来看,在当下其自动驾驶技术尚未完善的情况下,极端的事故场景还是难以避免的令人失望。
智能车安全包含什么?
从概念上来看,相比传统汽车,智能车安全所包含的内容则要更多一些,不光是要包含汽车本身的安全,还要设计配套设施功能的安全,就好比未来高级自动驾驶场景下,安全不仅仅要考虑车本身的安全,可能还要把范围扩大到道路、交通、云控系统。只把车本身做安全,或许还是远远不够。

我们可以把安全分为基本安全、功能安全、预期功能安全、信息安全四个阶段。当AI导入以后,不确定的东西也会一起带进来,我们的感知系统、决策系统、相关的环境都会有很多不确定性。
看了这么多关于安全的概念,大家可能会有些疑惑,下面我们就具体来解释一下:
①基本安全——就像一般人首先能想到那样,包括被动安全(车身是否结实耐撞)、主动安全(AEB是否高效)、事故后补救措施(能否自动呼叫救援)等等。在传统汽车时代中,一款车的安全性主要就由基本安全来衡量了。当然,在智能车时代一款车仅仅做好基本安全还不够,但基本安全永远是整体安全的基石。
②功能安全——简单来说就是车上的每一个部件、每一种功能是否能在恰当的时候发挥作用。当然,大家要知道绝对安全是没有的,但随着科技发展,车辆功能安全性上“相对”与“绝对”的差距也在缩小。
③预期功能安全——随着智能驾驶技术的发展,人们发现车辆安全问题并非都源于系统错误和失效。现实中,复杂多变的路况、天气和人为操作等因素,往往会带来非预期性的安全问题。研发人员无法预知具体事件,但他们可以通过更好的设计,让车辆面对突发情况时不会有太过离谱的表现。
④信息安全——这应该是最好理解的一种安全了,信息安全衡量的是系统硬件、软件、数据是否容易被破坏、更改或泄露。在汽车智能化浪潮下,信息安全也变得前所未有地重要起来。
汽车智能化浪潮下,人们对于整车安全的认知、理解、期待都在与时俱进,按照旧时代的思路造车恐怕很难做到真正的安全。可以看出,系统安全稳定,已经成为全球共识,尤其是在AI驱动并接管驾驶权的智能汽车3.0时代。作为面向AI而生的集度首款汽车机器人已经开启了更加超前的安全布局,我们不妨以集度的方案为参考,一起来看下智能汽车安全是否有更完善的解决方案。
集度如何死磕安全?
作为汽车机器人的缔造者,集度基于仿生学把汽车机器人分为“大脑”、“神经”、“躯干”三部分。智能驾驶和智能座舱相关能力是大脑,智能化架构JET做神经,整车结构和动力总成为躯干。利用全覆盖、低时延、高带宽的千兆以太网环路,链接全车传感器、高性能计算平台等重要"器官",满足底层硬件、AI能力、上层应用服务的高效贯通。
可见,自出生起,集度就是把汽车机器人当做一个高级的类人智能体来打造的。集度认为,可被用户感知的安全更为重要,只有实现设计、验证、感知的闭环,才能真正做到“安全可靠”。在大脑、神经、躯干等新物种核心组成部分上,集度将安全设定为其第一性的物种天赋,即“设计安全”。
诚然,前文提到的基本安全、功能安全、预期功能安全和信息安全都很重要,但最终对整车安全性起到提纲挈领作用的还是设计安全。更准确地说,是电子电气架构的设计安全。因为在车辆的整个生命周期里面,只有电子电气架构是不会变的。同时,电子电气架构也决定了未来功能升级、OTA的应用潜力。

可以说,好的电子电气架构一定可以将各个系统融会贯通、发挥“1+1>2”的效果,同时高度模块化且有足够的进化空间。集度通过自研的高阶自动驾驶智能化架构 JET,将电子电气架构 EEA 和 SOA 操作系统有效融合,实现了智驾域、智舱域、整车域和运动域的全域融通,让整车控制真正做到「如臂使指」。
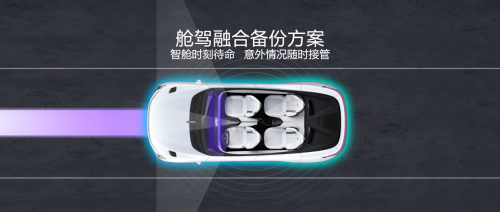
依托JET架构,集度实现了业界独有的“舱驾融合”备份方案——当智驾域控制器在极端情况下失效时,智舱域控制器能够及时地接管驾驶任务,让汽车靠边安全停车。
——这样,集度汽车机器人就可以通过创新的舱驾融合备份,来避免像特斯拉一样的在事故前一秒Autopilot自动驾驶下线的迷之操作了!
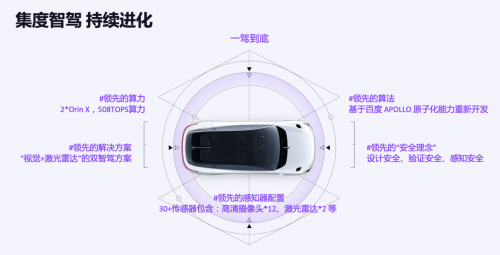
当然,实现舱驾融合并非只靠架构,更要依托算力。集度汽车机器人的智舱系统采用高通8295芯片,单片算力高达30TOPS。这个算力不仅达到了上一代智舱旗舰8155芯片的8倍左右,更是比某竞品智驾系统的两块芯片加一起还高。当然,集度的智驾芯片也是业界天花板,

同时,ROBO-01概念车还配备了“视觉+激光雷达”两套自动驾驶系统。不管是纯视觉,还是激光雷达多传感器融合,都不能完全破解corner case。集度搭载了两套自动驾驶的好处是,这两套系统相互独立,还能够互相补充,互为冗余。“跳灯式”可升降双激光雷达能覆盖前方180°FOV,也比其他车企的120°FOV或者150°FOV来得更广。看得更多、更全,自然也就更安全。

验证安全也是自动驾驶技术的关键所在。集度有百度Apollo的赋能,自2013年布局开始,百度Apollo收集了超过3200万公里的路测数据,且近10年来没有造成一次主责事故。同时,依托百度地图的强大实力,集度在高阶导航辅助驾驶、V2X车路协同驾驶等领域的能力也是业界领先。

在感知方面,集度ROBO-01概念车上有许多人机交互层面的创新。例如,全离线智能语音,即使在隧道、地库等没有信号的地方,也能照常使用,而且还是毫秒级的响应速度。这就突破了当前车载智能语音不能离线和1秒以上延迟的弊端。

再比如,相比传统二维导航的,3D动态人机共驾地图实现了静态地图导航和动态感知数据融合,车就像跑在这个数字世界里。还有基于唇语捕捉、声纹识别、视觉感知等多模态融合的人机交互。车外的交互式AI像素灯可以通过“灯语”向过往车辆、行人传递信息。
集度如此注重安全,是因为未来汽车机器人中AI将会有更大自主权,必须把安全提前考虑,从底层架构、到芯片,算法、到上层体验交互的重构,尽可能地规避机器的极端失效和人的不确定性。这种安全的思考,不仅局限于对车内用户的保护,还把车外其他交通参与者也纳入到了安全体系之内。
在智能汽车的安全上,集度一直心存敬畏,相信等到汽车机器人的量产车面世时,一定会给大家带来超出预期的表现。
- 分享到:
热门文章

中国台湾地区宣布6月30日前关停3G服务,闲置频段将投入5G发展
2024/4/1 17:12:02
弗若斯特沙利文:百度文心一言稳居国产大模型第一
2024/3/27 14:26:11
小米汽车SU7/Pro/Max正式发布并上市,21.59万元起
2024/3/29 10:40:35
特斯拉大裁员殃及上海厂,电动车该泼冷水了
2024/4/16 14:37:02
贝塔观点 | AIGC技术在营销领域应用三大方向
2024/3/29 10:27:22
外媒热议小米SU7定价:比特斯拉便宜 彰显品牌信心
2024/3/29 12:12:26



扫一扫,或长按识别二维码
关注贝塔网官方微信公众号